Mechanisms
| Mechanisms | |
| Functions | |
| Parallel_3RPR | Constructs the Manipulator object of a planar 3-R P R manipulator. |
| Parallel_3RPR_full | Constructs the Manipulator object of a planar 3-R P R manipulator. |
| Parallel_3PRR | Constructs the Manipulator object of a 3- P R R manipulator. |
| ParallelPRP2PRR | |
| Parallel_RPRRP | Constructs the Manipulator object of a R P R R P manipulator. |
| Parallel_RR_RRR | Constructs the Manipulator object of a 2-R R manipulator. |
| Parallel_PRRP | Constructs the Manipulator object of a P R R P manipulator. |
| Orthoglide | Constructs the Manipulator object of the Orthoglide manipulator. |
| ParallelRPR2PRR | Constructs the Manipulator object of the R P R 2-P R R manipulator. |
| Parallel3PPPS | Constructs the Manipulator object of the 3- P P P S manipulator. |
| Serial3R | Constructs the Manipulator object of the serial 3R manipulator. |
| Parallel3PRSd | Constructs the Manipulator object of the 3- P R S manipulator. |
| Parallel3PRSc | Constructs the Manipulator object of the 3- P R S manipulator. |
Parallel_3RPR
Parallel_3RPR := proc( { d1 ::algebraic := 17.04, d2 ::algebraic := 16.54, d3 ::algebraic := 20.84, beta ::algebraic := arccos ((d2^2-d3^2-d1^2)/(-2*d3*d1)), A2x ::algebraic := 15.91, A3x ::algebraic := 0, A3y ::algebraic := 10, precision ::integer := 4 } , morespec ::seq(name=algebraic), moreranges ::seq(name=range) )
Constructs the Manipulator object of a planar 3-R P R manipulator.
Parameters
| name = constant | the geometric parameters of the robot (see Figure1), |
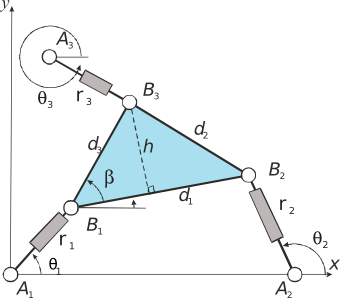
- where name is one of d1, d2, d3, beta, A2x, A3x, A3y,
- and constant is a numerical value.
- All the variables d1, d3, A2x, A3x, A3y must be assigned.
- One of d2, beta must be assigned (if both are assigned, d3 is ignored).
- By default, the values are d1 = 17.04, d2 = 16.54, d3 = 20.84, A2x = 15.91, A3x = 0, A3y = 10.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the planar 3-R P R manipulator whose dimensions are given in input.
Example
> robot := Parallel_3RPR (d1=3, d2=4, d3=5, A2x=5, A3x=0, A3y=5):
> robot[Equations];
2 2 2 2 2
[cosAlpha + sinAlpha - 1, B1x + B1y - R1, B1x + 6 B1x cosAlpha - 10 B1x
2 2 2
+ 9 cosAlpha - 30 cosAlpha + 25 + B1y + 6 B1y sinAlpha + 9 sinAlpha
2 2
- R2, B1x + 6 B1x cosAlpha - 8 B1x sinAlpha + 25 cosAlpha
2 2
+ 25 sinAlpha + B1y + 8 B1y cosAlpha + 6 B1y sinAlpha - 10 B1y
- 40 cosAlpha - 30 sinAlpha + 25 - R3]Parallel_3RPR_full
Parallel_3RPR_full := proc( morespec ::seq(name=algebraic), precision := 4 )
Constructs the Manipulator object of a planar 3-R P R manipulator.
Parameters
| name = constant | the geometric parameters of the robot (see Figure1), |
- where name is one of d1, d2, d3, beta, A2x, A3x, A3y,
- and constant is a numerical value.
- All the variables d1, d3, A2x, A3x, A3y must be assigned.
- One of d2, beta must be assigned (if both are assigned, d3 is ignored).
- By default, the values are d1 = 17.04, d2 = 16.54, d3 = 20.84, A2x = 15.91, A3x = 0, A3y = 10.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the planar 3-R P R manipulator whose dimensions are given in input.
Parallel_3PRR
Parallel_3PRR := proc( morespec ::seq(name=algebraic), precision := 4 )
Constructs the Manipulator object of a 3- P R R manipulator.
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is one of l1, l2,
- and constant is a numerical value.
- By default, the values are l1 = 1, l2 = 1.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the planar P R R P manipulator whose dimensions are given in input.
Example
> robot := Parallel_3PRR (l1=1,l2=1): > robot[Equations];
TODO
ParallelPRP2PRR
ParallelPRP2PRR := proc( morespec ::seq(name=algebraic), precision := 4 )
| Constructs the *Manipulator* object of a P R P | 2 P R R manipulator. |
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is one of l1, l2, a, b,
- and constant is a numerical value.
- By default, the values are l1 = 1, l2 = 1.5, a = 1, b = 1.2
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
| A *Manipulator* data structure representing the planar 2 P R R | P R P manipulator whose dimensions are given in input. |
Example
> robot := ParallelPRP2PRR (l1=1,l2=1):
> robot[Equations];
2 2 2 2
[1 - x + 2 x cos(phi) + 2 x rho1 - cos(phi) - 2 cos(phi) rho1 - rho1 - y
2 2
+ 2 y sin(phi) - sin(phi) , 1 - x - 12/5 x cos(phi) + 2 x rho2
36 2 2 2
- -- cos(phi) + 12/5 cos(phi) rho2 - rho2 - y - 12/5 y sin(phi)
25
36 2
- -- sin(phi) , -4 x cos(phi) + 4 cos(phi) rho3 - 4 y sin(phi)]
25Parallel_RPRRP
Parallel_RPRRP := proc( { e ::constant := 0.7, L4 ::constant := 1, S2min ::constant := 0.5, S2max ::constant := 1.5, S4min ::constant := 0.1, S4max ::constant := 1.1, precision := 4 } , morespec ::seq(name=algebraic) )
Constructs the Manipulator object of a R P R R P manipulator.
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is one of e, L4, S2min, S2max, S4min, S4max,
- and constant is a numerical value.
- By default, the values are e = 0.7, L4 = 1, S2min = 0.5, S2max = 1.5, S4min = 0.1, S4max = 1.1.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the planar R P R R P manipulator whose dimensions are given in input.
Example
> robot := Parallel_RPRRP (e=1,L4=1): > robot[Equations];
Parallel_RR_RRR
Parallel_RR_RRR := proc( morespec ::seq(name=algebraic), precision := 4 )
Constructs the Manipulator object of a 2-R R manipulator.
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is one of e, l1, l2, l3, l4,
- and constant is a numerical value.
- By default, the values are e = 1, l1 = 1, l2 = 1, l3 = 1, l4 = 1.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the planar 2-R R manipulator whose dimensions are given in input.
Example
> robot := Parallel_RR_RRR (e=1,L4=1): > robot[Equations];
Parallel_PRRP
Parallel_PRRP := proc( morespec ::seq(name=algebraic), precision := 4 )
Constructs the Manipulator object of a P R R P manipulator.
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is one of l1, l2,
- and constant is a numerical value.
- By default, the values are l1 = 1, l2 = 1.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the planar P R R P manipulator whose dimensions are given in input.
Example
> robot := Parallel_PRRP (l1=1,l2=1): > robot[Equations];
Orthoglide
Orthoglide := proc( morespec ::seq(name=algebraic), precision := 4 )
Constructs the Manipulator object of the Orthoglide manipulator.
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is one of l1, l2,
- and constant is a numerical value.
- By default, the values are l1 = 1, l2 = 1.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the Orthoglide manipulator whose dimensions are given in input.
Example
> robot := Orthoglide (l1=1,l2=1,l3=1): > robot[Equations];
ParallelRPR2PRR
ParallelRPR2PRR := proc( morespec ::seq(name=algebraic), precision := 4 )
Constructs the Manipulator object of the R P R 2-P R R manipulator.
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is one of a, b, L2, L3,
- and constant is a numerical value.
- By default, the values are a = 1, b = 4, L2 = 2, L3 = 2.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the Orthoglide manipulator whose dimensions are given in input.
Example
> robot := ParallelRPR2PRR (): > robot[Equations];
Parallel3PPPS
Parallel3PPPS := proc( morespec ::seq(name=algebraic), precision := 4, { quaternions ::truefalse := false, tiltandtorsion ::truefalse := false, normalize ::truefalse := false, ortho ::truefalse := false } )
Constructs the Manipulator object of the 3- P P P S manipulator.
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is either one of Ax, Ay, Az, Bx, By, Bz, Cx, Cy, Cz, or one of L1, L2, L3.
- and constant is a numerical value.
- By default, the values are Ax = 1, Ay = 0, Az = 0, Bx = 0, By = 1, Bz = 0, Cx = 0, Cy = 0, Cz = 1, and L1 = (Bx-Ax)^2 + (By-Ay)^2 + (Bz-Az)^2, L2 = (Cx-Bx)^2 + (Cy-By)^2 + (Cz-Bz)^2, L3 = (Ax-Cx)^2 + (Ay-Cy)^2 + (Az-Cz)^2.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the Orthoglide manipulator whose dimensions are given in input.
Example
> robot := Parallel3PPPS (): > robot[Equations];
Serial3R
Serial3R := proc( morespec ::seq(name=algebraic), precision := 4 )
Constructs the Manipulator object of the serial 3R manipulator.
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is one of theta1, d2, d3, d4, r2, r3,
- and constant is a numerical value.
- By default, the values are theta1 = 0, d2 = 1, d3 = 0.5, d4 = 0.8, r2 = 0.15, r3 = 0.1.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the Orthoglide manipulator whose dimensions are given in input.
Example
> robot := Serial3R (): > robot[Equations];
Parallel3PRSd
Parallel3PRSd := proc( morespec ::seq(name=algebraic), precision := 4, { quaternions ::truefalse := false, tiltandtorsion ::truefalse := false, ortho ::truefalse := false, normalize ::truefalse := false } )
Constructs the Manipulator object of the 3- P R S manipulator.
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is one of r, l.
- and constant is a numerical value.
- By default, the values are r = 1.3 and *l*=1.5.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the 3- _P R S manipulator with parallel prismatics, whose dimensions are given in input.
Example
> robot := Parallel3PRSd (): > robot[Equations];
Parallel3PRSc
Parallel3PRSc:= proc( morespec ::seq(name=algebraic), precision := 4, { quaternions ::truefalse := false } )
Constructs the Manipulator object of the 3- P R S manipulator.
Parameters
| name = constant | the geometric parameters of the robot, |
- where name is one of r, l.
- and constant is a numerical value.
- By default, the values are r = 1.3 and *l*=1.5.
| precision = integer (optional) | the precision, where integer is the number of significative digits; default value: 4. |
Returns
A Manipulator data structure representing the Orthoglide manipulator whose dimensions are given in input.
Example
> robot := Parallel3PRSc (): > robot[Equations];